|
API
|

|
|
API
|
|
#include <Eigen/Dense>#include <mx/improc/eigenCube.hpp>#include <mx/improc/eigenImage.hpp>#include "utils.hpp"#include "recursive_least_squares.hpp"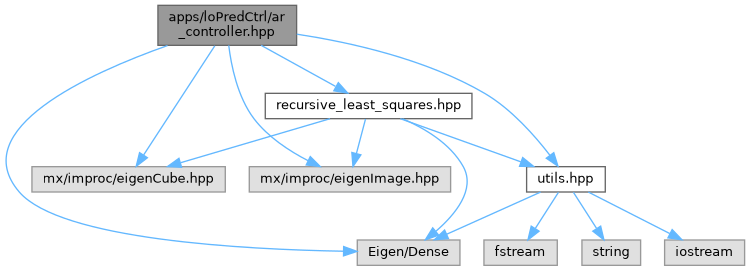
Go to the source code of this file.
Classes | |
| class | DDSPC::PredictiveController |
Namespaces | |
| namespace | DDSPC |
 1.9.8
1.9.8