|
API
|

|
|
API
|
|
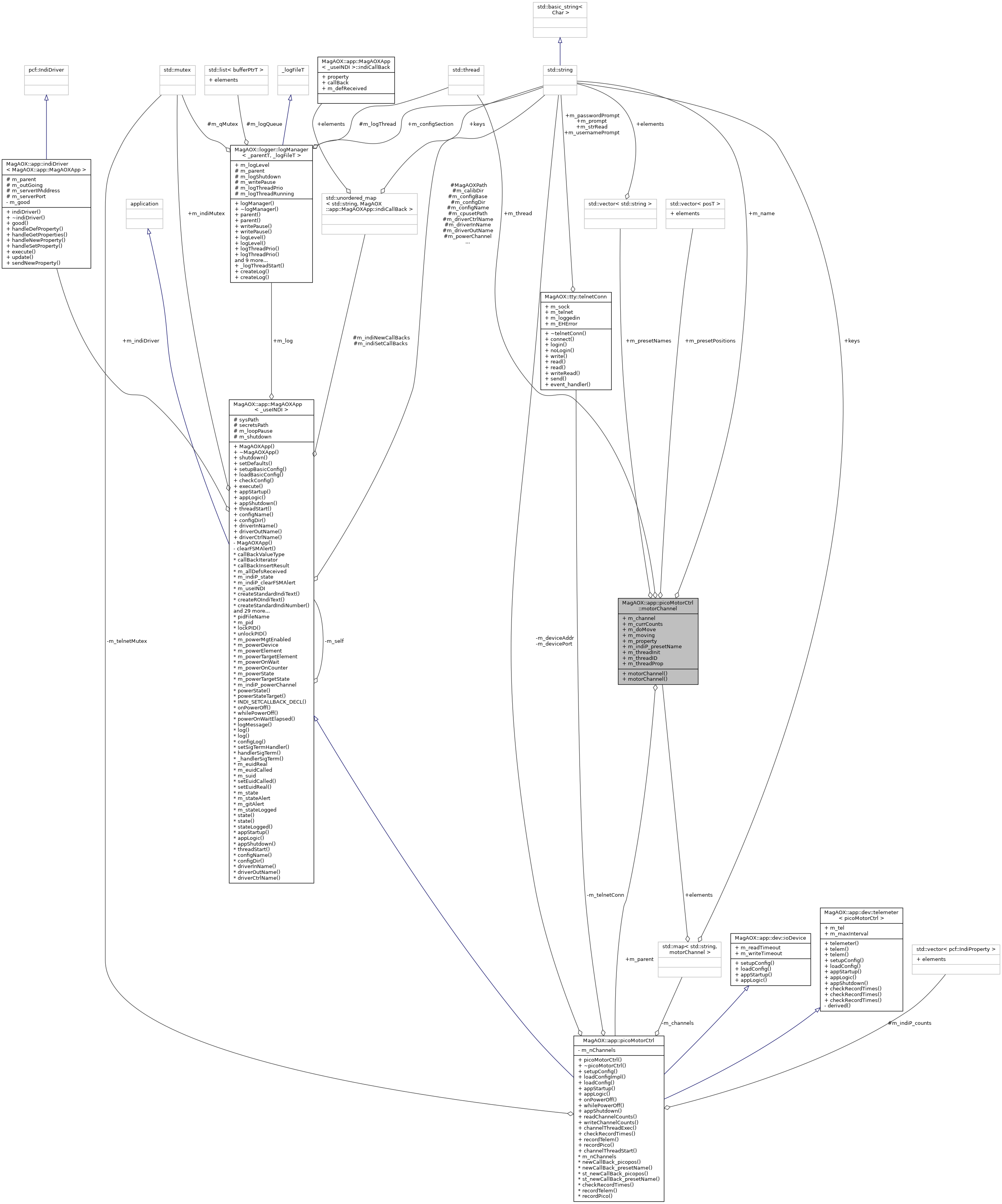
Public Member Functions | |
| motorChannel (picoMotorCtrl *p) | |
| motorChannel (picoMotorCtrl *p, const std::string &n, int add, int ch, int type) | |
| motorChannel (const motorChannel &mc) | |
Public Attributes | |
| picoMotorCtrl * | m_parent {nullptr} |
| A pointer to this for thread starting. | |
| std::string | m_name |
| The name of this channel, from the config section. | |
| int | m_address {1} |
| The controller address, default is 1. | |
| int | m_channel {-1} |
| The number of this channel, where the motor is plugged in. | |
| int | m_type {3} |
| The motor type of this channel, default is 3. | |
| std::vector< std::string > | m_presetNames |
| std::vector< posT > | m_presetPositions |
| posT | m_currCounts {0} |
| The current counts, the cumulative position. | |
| bool | m_doMove {false} |
| Flag indicating that a move is requested. | |
| bool | m_moving {false} |
| Flag to indicate that we are actually moving. | |
| pcf::IndiProperty | m_property |
| pcf::IndiProperty | m_indiP_presetName |
| std::thread * | m_thread {nullptr} |
| bool | m_threadInit {true} |
| Thread initialization flag. | |
| pid_t | m_threadID {0} |
| The ID of the thread. | |
| pcf::IndiProperty | m_threadProp |
| The property to hold the thread details. | |
Definition at line 99 of file picoMotorCtrl.hpp.
|
inlineexplicit |
| [in] | p | The parent point to set |
Definition at line 131 of file picoMotorCtrl.hpp.
References m_thread.
|
inline |
| [in] | p | The parent point to set |
| [in] | n | The name of this channel |
| [in] | add | The controller address |
| [in] | ch | The number of this channel |
| [in] | type | The motor type of this channel |
Definition at line 136 of file picoMotorCtrl.hpp.
References m_thread.
|
inline |
Definition at line 146 of file picoMotorCtrl.hpp.
References MagAOX::app::MagAOXApp< _useINDI >::log(), m_address, m_channel, m_currCounts, m_doMove, m_indiP_presetName, m_moving, m_name, m_parent, m_presetNames, m_presetPositions, m_property, m_thread, m_threadID, m_threadInit, m_threadProp, and m_type.
| int MagAOX::app::picoMotorCtrl::motorChannel::m_address {1} |
The controller address, default is 1.
Definition at line 105 of file picoMotorCtrl.hpp.
Referenced by motorChannel().
| int MagAOX::app::picoMotorCtrl::motorChannel::m_channel {-1} |
The number of this channel, where the motor is plugged in.
Definition at line 107 of file picoMotorCtrl.hpp.
Referenced by motorChannel().
| posT MagAOX::app::picoMotorCtrl::motorChannel::m_currCounts {0} |
The current counts, the cumulative position.
Definition at line 114 of file picoMotorCtrl.hpp.
Referenced by motorChannel().
Flag indicating that a move is requested.
Definition at line 116 of file picoMotorCtrl.hpp.
Referenced by motorChannel().
| pcf::IndiProperty MagAOX::app::picoMotorCtrl::motorChannel::m_indiP_presetName |
Definition at line 120 of file picoMotorCtrl.hpp.
Referenced by motorChannel().
Flag to indicate that we are actually moving.
Definition at line 117 of file picoMotorCtrl.hpp.
Referenced by motorChannel().
| std::string MagAOX::app::picoMotorCtrl::motorChannel::m_name |
The name of this channel, from the config section.
Definition at line 103 of file picoMotorCtrl.hpp.
Referenced by motorChannel().
| picoMotorCtrl* MagAOX::app::picoMotorCtrl::motorChannel::m_parent {nullptr} |
A pointer to this for thread starting.
Definition at line 101 of file picoMotorCtrl.hpp.
Referenced by motorChannel().
| std::vector<std::string> MagAOX::app::picoMotorCtrl::motorChannel::m_presetNames |
Definition at line 111 of file picoMotorCtrl.hpp.
Referenced by motorChannel().
| std::vector<posT> MagAOX::app::picoMotorCtrl::motorChannel::m_presetPositions |
Definition at line 112 of file picoMotorCtrl.hpp.
Referenced by motorChannel().
| pcf::IndiProperty MagAOX::app::picoMotorCtrl::motorChannel::m_property |
Definition at line 119 of file picoMotorCtrl.hpp.
Referenced by motorChannel().
| std::thread* MagAOX::app::picoMotorCtrl::motorChannel::m_thread {nullptr} |
Thread for managing this channel. A pointer to allow copying, but must be deleted in d'tor of parent.
Definition at line 122 of file picoMotorCtrl.hpp.
Referenced by motorChannel(), motorChannel(), and motorChannel().
| pid_t MagAOX::app::picoMotorCtrl::motorChannel::m_threadID {0} |
The ID of the thread.
Definition at line 127 of file picoMotorCtrl.hpp.
Referenced by motorChannel().
Thread initialization flag.
Definition at line 125 of file picoMotorCtrl.hpp.
Referenced by motorChannel().
| pcf::IndiProperty MagAOX::app::picoMotorCtrl::motorChannel::m_threadProp |
The property to hold the thread details.
Definition at line 129 of file picoMotorCtrl.hpp.
Referenced by motorChannel().
| int MagAOX::app::picoMotorCtrl::motorChannel::m_type {3} |
The motor type of this channel, default is 3.
Definition at line 109 of file picoMotorCtrl.hpp.
Referenced by motorChannel().
 1.9.8
1.9.8